
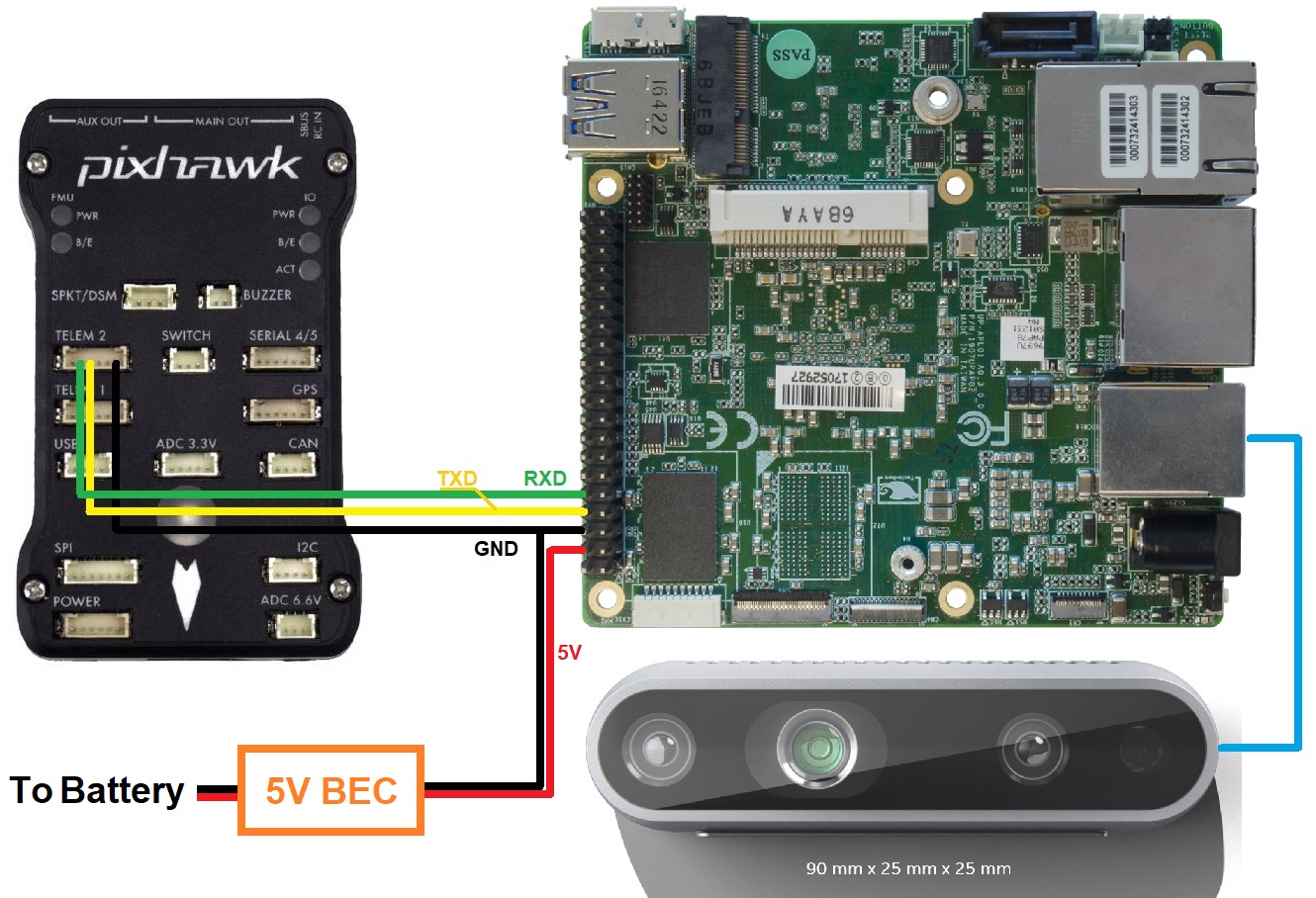
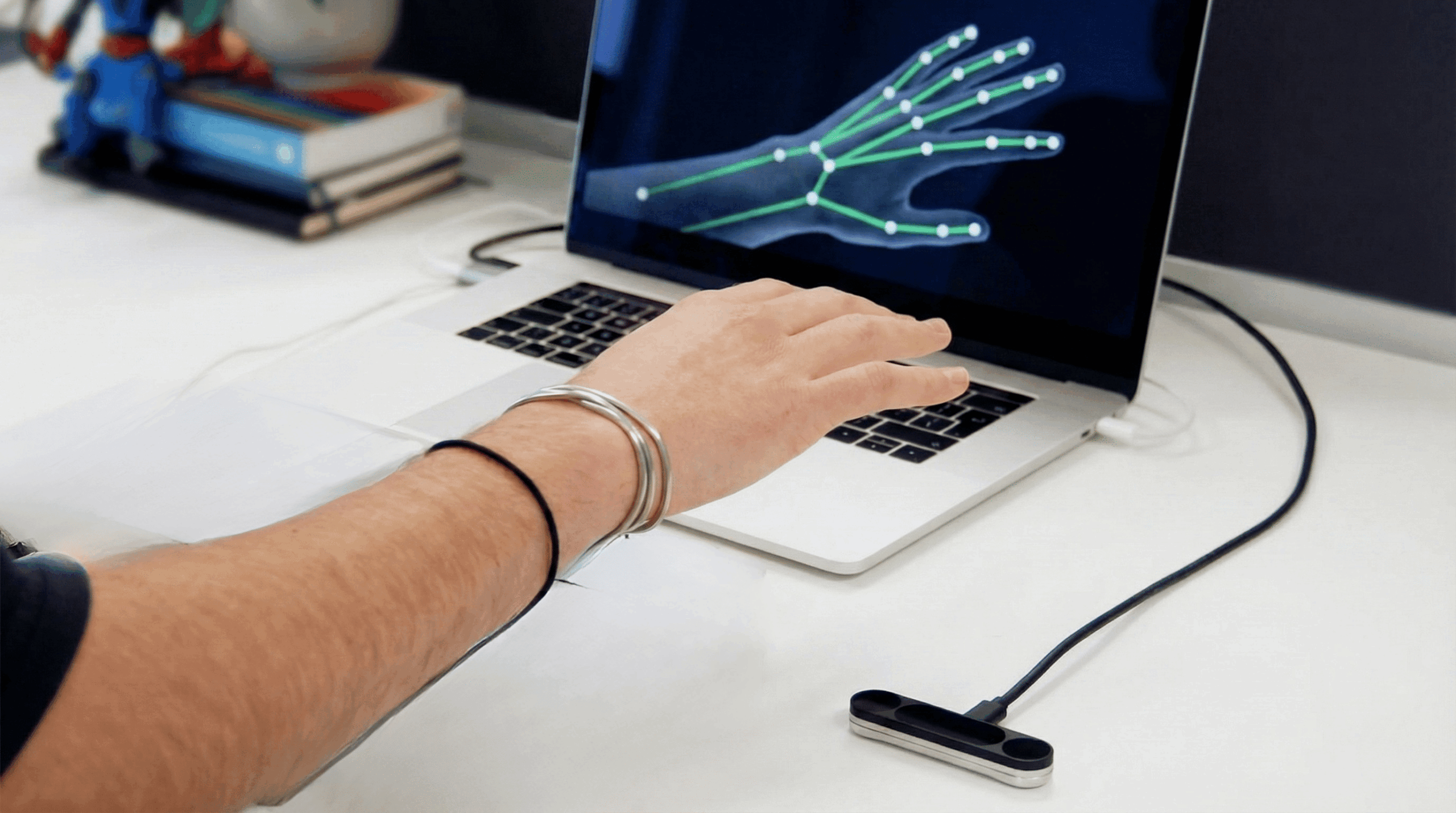
การติดตั้ง Intel RealSense D435i เป็นการอัปเกรดที่คุ้มค่ามากสำหรับโดรนประกอบ เพื่อให้สามารถบินในที่แคบหรือ Indoor ได้ปลอดภัยขึ้น อย่างไรก็ตาม “ห้ามไว้ใจระบบ 100%” โดยเฉพาะในสภาวะแสงแดดจ้า (ซึ่งรบกวนแสง IR) หรือเมื่อเจอกับวัตถุโปร่งใสอย่างกระจก สั่งซื้อ Intel RealSense D435i วันนี้ที่ MTXR Shop คลิกเลย!
สั่งซื้อ Intel RealSense D435i วันนี้ที่ MTXR Shop คลิกเลย!


{kind=link}
{kind=link}
{kind=link}
{kind=link}