
เจาะลึก Intel RealSense D435i: สุดยอดกล้อง Depth Camera พร้อม IMU ตัวจบงาน Robot และ Drone
ในโลกของ Computer Vision และ Robotics การจะหุ่นยนต์สักตัวให้ “มองเห็น” และ “เข้าใจ” โลก 3 มิติได้นั้น ไม่ใช่เรื่องง่าย แต่ Intel RealSense D435i ได้เข้ามาเปลี่ยนเกมนี้ไปตลอดกาล ด้วยการรวมเอากล้องวัดความลึกคุณภาพสูง เข้ากับเซนเซอร์จับการเคลื่อนไหว (IMU) ไว้ในบอดี้ขนาดจิ๋วเพียงฝ่ามือเดียว
วันนี้ MTXR จะพาไปเจาะลึกทุกซอกทุกมุมว่า ทำไมเจ้า D435i ถึงเป็นอุปกรณ์ที่นักพัฒนาทั่วโลกขาดไม่ได้ และมันคุ้มค่าแค่ไหนกับการลงทุน
1. รหัส "i" ที่เปลี่ยนทุกอย่าง: ทำไม IMU ถึงสำคัญ?

Intel RealSense D435 รุ่นธรรมดานั้นยอดเยี่ยมอยู่แล้ว แต่เมื่อเติม “i” (IMU – Inertial Measurement Unit) เข้าไป มันเหมือนการติด “หูชั้นใน” ให้กับหุ่นยนต์ครับ
ภายใน D435i บรรจุเซนเซอร์ Bosch BMI055 ซึ่งทำงานแบบ 6 Degrees of Freedom (6DoF) ประกอบด้วย:
Accelerometer (วัดความเร่ง): รู้ว่ากล้องกำลังเคลื่อนที่เร็วแค่ไหน
Gyroscope (วัดการหมุน): รู้ว่ากล้องกำลังเอียง (Pitch), หัน (Yaw), หรือหมุน (Roll) องศาไหน
ประโยชน์มหาศาล: เมื่อคุณนำกล้องไปติดบน โดรน หรือ หุ่นยนต์เดินตาม ที่มีการสั่นไหว ข้อมูลจาก IMU จะถูกนำมาใช้เพื่อชดเชย (Compensate) ภาพ Depth ที่อาจจะเบลอหรือเพี้ยนจากการขยับ ทำให้ได้ข้อมูล 3D Point Cloud ที่นิ่งและแม่นยำ แม้กล้องจะกำลังเคลื่อนที่ด้วยความเร็วสูงก็ตาม
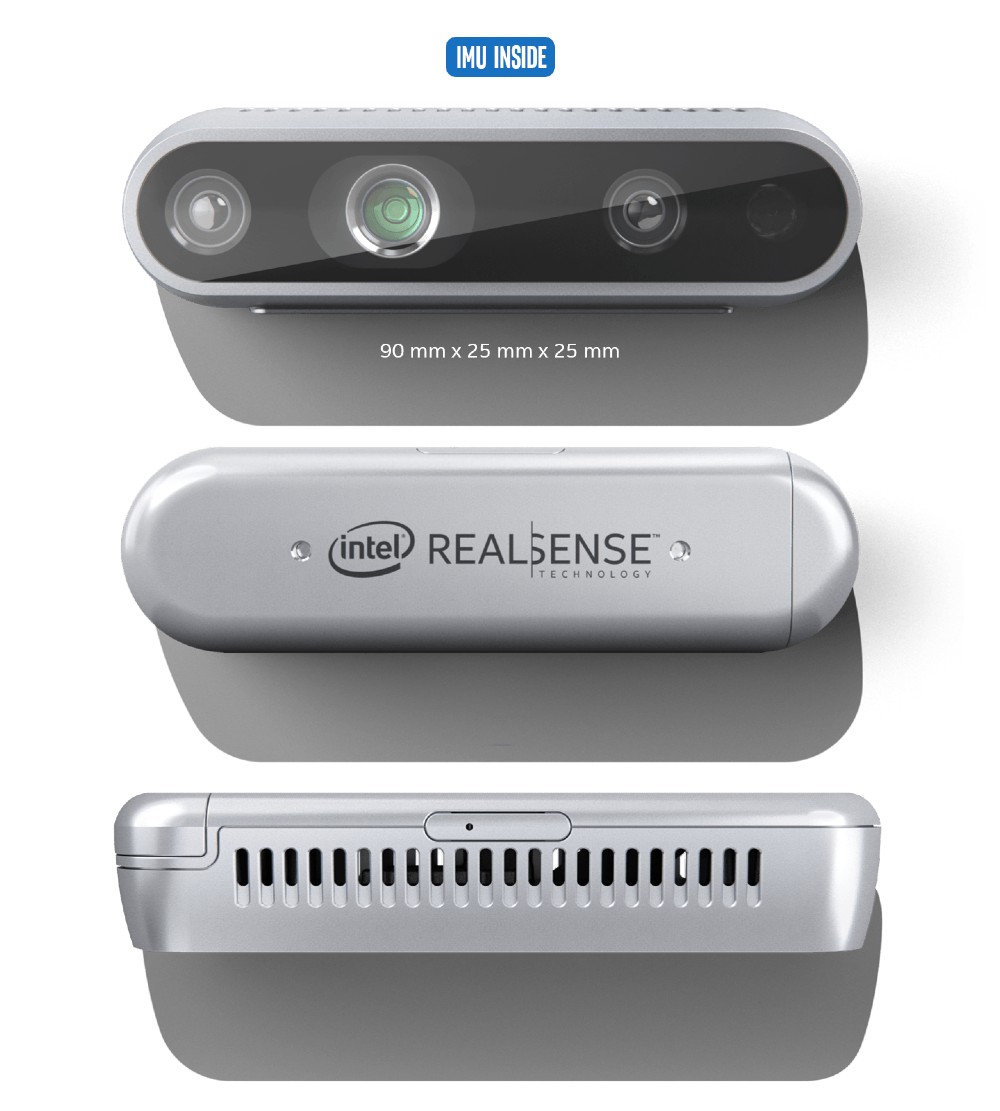
2. Stereo Depth Technology: มองเห็นแม้ในที่มืด
D435i ใช้หลักการ Active Stereo IR คือมีกล้องอินฟราเรด 2 ตัว (ซ้าย-ขวา) ทำหน้าที่เหมือนดวงตามนุษย์เพื่อคำนวณระยะห่าง แต่มันพิเศษกว่านั้นตรงที่มี “IR Projector” ตรงกลาง
ปัญหาเดิม: กล้อง Depth ทั่วไปจะวัดระยะ “กำแพงสีขาวเรียบๆ” ไม่ค่อยได้ เพราะไม่มีลวดลาย (Texture) ให้จับ
ทางแก้ของ D435i: ตัว IR Projector จะยิงลายจุดอินฟราเรด (ที่มองไม่เห็นด้วยตาเปล่า) ออกไปฉาบวัตถุ ทำให้กล้องสามารถวัดระยะได้แม่นยำแม้จะเป็นผนังเรียบๆ หรือในที่แสงน้อยก็ตาม
3. Global Shutter: หัวใจสำคัญของวัตถุเคลื่อนที่
ข้อนี้สำคัญมากสำหรับสาย Drone Racing หรือหุ่นยนต์ AMR (Autonomous Mobile Robots)
กล้องทั่วไปมักใช้ Rolling Shutter (สแกนภาพทีละบรรทัด) ซึ่งถ้าวัตถุขยับเร็ว ภาพจะเกิดอาการ “ย้วย” (Jello effect) แต่ D435i ใช้เซนเซอร์แบบ Global Shutter ทั้งสองตัว ซึ่งจะบันทึกภาพทั้งเฟรมพร้อมกันในเสี้ยววินาที
ผลลัพธ์: คุณจะได้ภาพที่คมชัด หยุดนิ่ง ไม่บิดเบี้ยว ซึ่งจำเป็นอย่างยิ่งเมื่อต้องให้ AI ประมวลผลหลบสิ่งกีดขวางแบบ Real-time
4. Software Ecosystem ที่แข็งแกร่งที่สุด
ฮาร์ดแวร์ดีแค่ไหน ถ้าเขียนโค้ดยากก็จบเห่ แต่ Intel ทำการบ้านมาดีมากด้วย Intel RealSense SDK 2.0
Cross-Platform: เขียนครั้งเดียวรันได้หมดทั้ง Windows, Linux (Ubuntu), macOS และ Android
ROS / ROS2 Ready: สำหรับสาย Robot นี่คือสวรรค์ เพราะมี Wrapper รองรับ ROS สมบูรณ์แบบ เสียบปุ๊บ เรียก Topic ใช้งานได้เลย
Language Support: รองรับภาษาฮิตทั้ง C++, Python, C#, และ Java
3rd Party Integration: ใช้งานร่วมกับ OpenCV, PCL (Point Cloud Library), Unity, และ Unreal Engine ได้ทันที
5. ตัวอย่างการใช้งานจริง (Use Cases)
Drone Navigation (GPS-Denied): ใช้ D435i บินในโกดังหรืออุโมงค์ที่ไม่มีสัญญาณ GPS โดยใช้เทคนิค Visual Odometry เพื่อระบุตำแหน่งตัวเอง
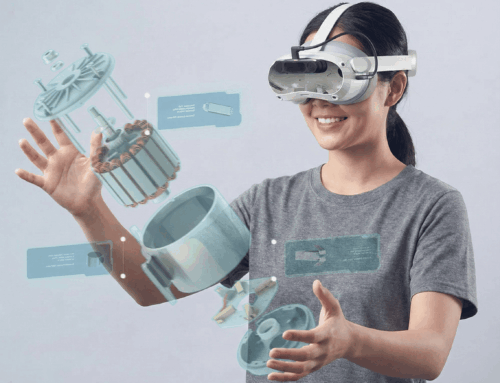
Handheld 3D Scanning: ใช้สแกนวัตถุหรือใบหน้าเพื่อทำโมเดล 3D ข้อมูลจาก IMU จะช่วยให้การต่อภาพ (Stitching) เนียนกริบ แม้มือคนถือจะสั่น
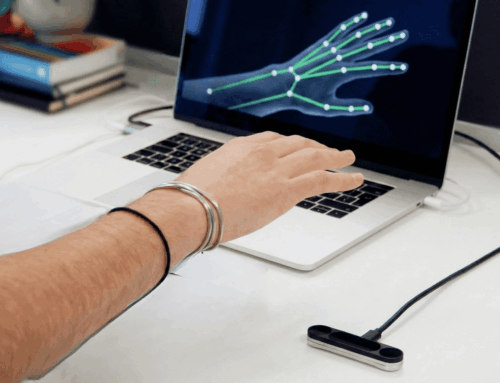
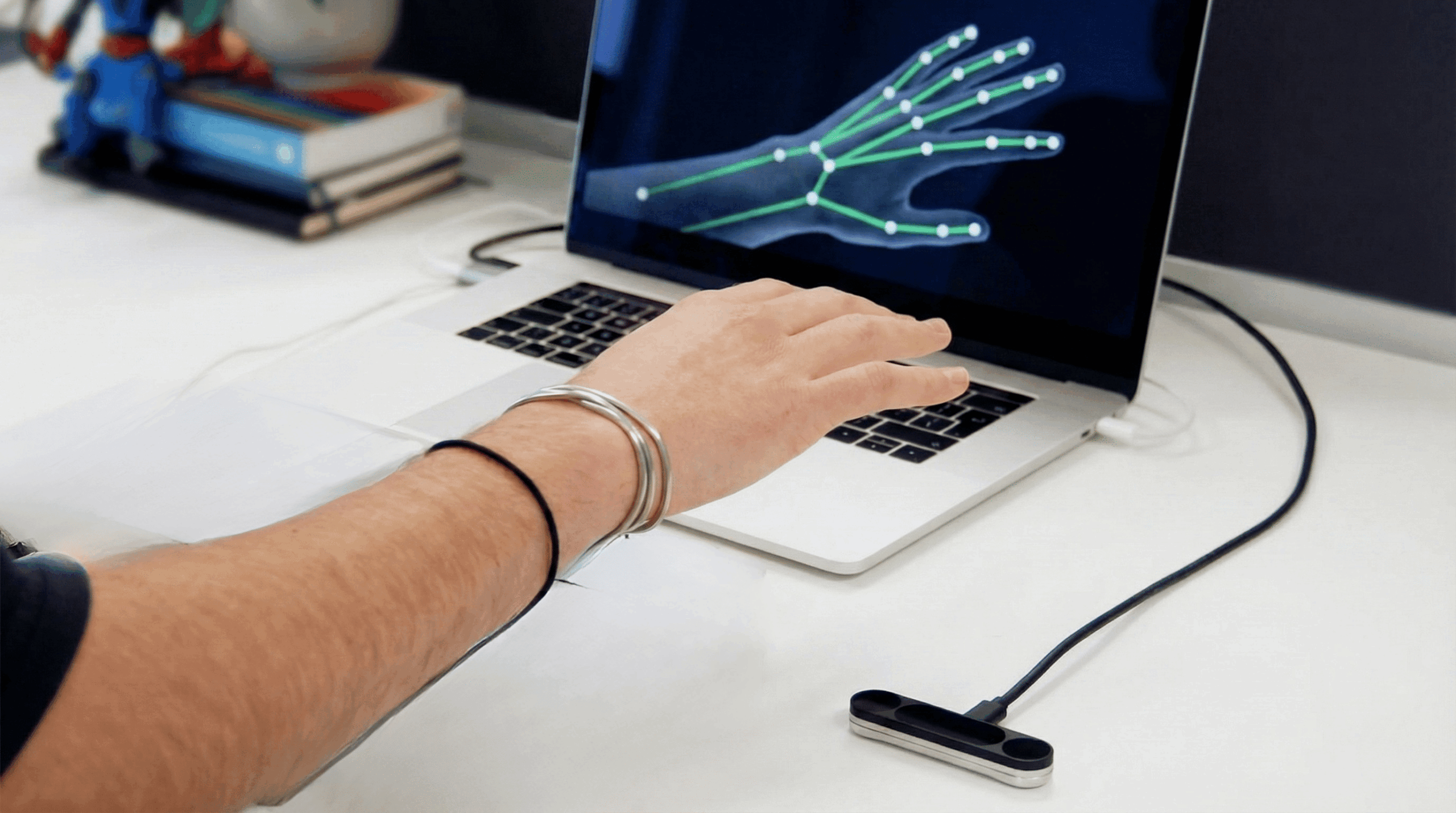
Interactive Signage: ใช้ทำป้ายโฆษณาที่โต้ตอบกับคนเดินผ่านได้ ตรวจจับท่าทาง (Gesture) หรือนับจำนวนคน
สเปกเจาะลึก (Detailed Specs)
ระยะที่เหมาะสม: 0.3 เมตร – 3 เมตร (Min-Max)
ความละเอียด Depth: สูงสุด 1280 x 720 ที่ 90 FPS
ความละเอียด RGB: 1920 x 1080 ที่ 30 FPS
ขนาด: 90 mm x 25 mm x 25 mm (เล็กและเบามาก เหมาะติดโดรน)
การเชื่อมต่อ: USB 3.1 Gen 1 Type-C (แนะนำให้ใช้สายที่แถมมา หรือสายคุณภาพสูงเท่านั้น)
สรุป: ลงทุนครั้งเดียว จบทุกงาน Dev
Intel RealSense D435i ไม่ใช่แค่กล้อง แต่มันคือ “แพลตฟอร์มการรับรู้” ที่สมบูรณ์แบบที่สุดในเรทราคานี้ ไม่ว่าคุณจะเป็นนักศึกษาวิศวกรรม, Maker, หรือบริษัท R&D การมี D435i ติดแล็บไว้ จะช่วยประหยัดเวลาในการพัฒนา (Development Time) ไปได้มหาศาลครับ
👉 สั่งซื้อ Intel RealSense D435i วันนี้ที่ MTXR Shop คลิกเลย!


{kind=link}
{kind=link}
{kind=link}
{kind=link}